Resolvi criar um robô chamado HERO-E (Por insistência da minha mulher e filhos) usando ARDUINO. Aqui vou postar as dificuldades e os sucessos até concluir o projeto.
Meu componente de comando de voz não reconhece o arduino mega 2560;
Com isso eu precisei pesquisar comunicação entre arduinos e minha arquitetura ficou consideravelmente mais complicada;
O arduino UNO controla:
LCD
Componente de comandos de voz
Sensor ultrassônico;
O Arduino mega 2560 controla:
Shield Motor L293D
Servo Motor do pescoço;
Pesquisei comunicação entre arduinos e até o momento o que funcionou foi colocando o pino TX (transferencia de dados serial) no RX (receptor de dados na serial) do outro arduino e conectando os GNDs. Só que com o L293D esse pino já é usado e pra isso preciso de novos testes.
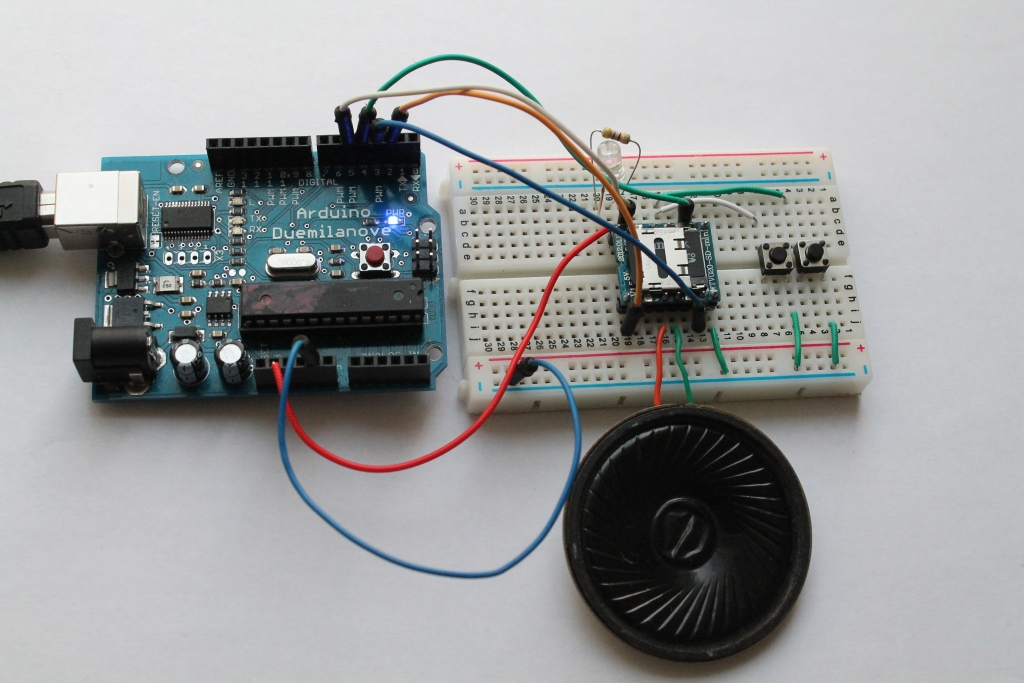
Comecei a pesquisar sobre o meu módulo de voz WTV-020 SD.
Gravei 4 sons para teste(Nome, bom dia, boa noite e bem vindo);
Estou pensando em como eu vou distribuir as peças dentro do "corpo (pote de sorvete)" do robô;
Ideia 1: Colocar duas buchas no porte de sorvete dividido em duas partes. Quando tiver que mexer, tira dois parafusos de um lado e poderei mexer e consertar algo no robô
Pro: Não precisa mexer nos componentes para abrir o robô;
Contra: tem que mexer nos parafusos
Ideia 2: Colocar o pote de sorvete com tampa e quando precisar mexer alguma coisa retirar a tampa.
Pró: Sem parafusos pra mexer e abrir seria simples
Contra: Estrutura dos componentes da cabeça poderia ser comprometida;
Depois de ficar dias empacado no chassi e motor, descobri com a ajuda do grupo do arduino brasil que o problema era que eu estava usando a bateria de 9V e deveria usar 4 pilhas de 1,5V em série;
com isso basicamente falta montar o robô. A parte eletrônica com exceção do DHT22 (que mede temperatura e umidade) já estão em mãos;
Hoje chegou o módulo de som do arduino, que fará o robô falar, nos próximos dias vou testar ele;
Juliana colocou mais requisitos para o Robô que devem ser implementados na versão 2.0 apenas (quer que ele seja secretário dela);
Um problema de lógica que estou tendo. Quero mapear minha casa para que o robô a partir de um ponto chegue a outro cômodo (aceito ajuda de quem ler esse post);
Gravei dois registros, o som "CASA" e o som "SAUDAÇÃO";
O HERO-E vai responder de uma forma diferente dependendo dos comandos;
Não gostei da capitação do microfone, como a entrada do chip é uma entrada normal de microfone do computador, vou colocar um melhor;
O circuito de reconhecimento de voz grava até 80 comandos mas só sobe na memoria até 7 por vez, com isso coloquei um comando que chama um MENU e a partir desse menu eu chamaria outras 6 opções de comandos de voz referentes a aquele menu. EX: HEROE (ativa os comandos de voz levantando na memoria o menu) ---> Saudação (ativa 6 comandos do grupo das saudações) --> CASA (mostra no LCD a mensagem "bem vindo em nossa casa");
Aprendi na marra a usar a ferramenta que tira a solda e consegui consertar a solda no meu LCD que funcionou perfeitamente;
A primeira vez que liguei o LCD, não consegui ver as letras porque coloquei um resistor muito forte, com o potenciômetro consegui ajustar e as letras apareceram;
A integração do LCD maior será com o reconhecimento de voz que ainda não consegui fazer funcionar (tive alguns bons avanços);
Fiz as trilhas da minha soldagem de treino e tudo funcionou, meu LED acendeu como era esperado apesar de visualmente a soldagem ter sido uma bosta;
a solda não ficou lá essas coisas, preciso de mais treino;
Descobri que minha placa Voice Recognition Module V3 tem um defeito e não achei na net alguem que conseguiu resolver, comecei a seguir esse cara (https://www.youtube.com/watch?v=H51aOdmI59E) pra ver se ele acha uma resolução;
soldei os pinos do meu LCD, acho que fiz cagada porque agora está dando curto circuito, acho que os pinos estão encostando um no outro;
Previsão de término da primeira versão do Robô: 8 meses;
Testei na placa de fenolite mas ainda faltavam alguns conselhos e fazer isso a partir de 1h da manhã com as luzes apagadas não faz o resultado ser bom;
soldei os componentes mas não fiz as trilhas, então não funcionou;
Comecei a estudar as vídeo aulas de eletrônica básica no link: https://www.youtube.com/channel/UCRhECnhnrWU-SqJaDXhLwow;
Não fui na santa efigênia / 25 de março. Preciso comprar alguns itens não eletrônicos para fazer o robô (binóculos, case para as placas);
Dentro de um binóculo vão ficar os LEDs verdes que serão os olhos do robô;
No teste, usei uma resistência de 470 ohms. Teoricamente eu precisaria usar a fórmula de calculo de voltagem (V(voltagem) = R (resistência) * I (corrente em Amperes)), mas simplesmente escolhi o de 470 ohms que funcionou pra todos os LEDs, de baixo e alto brilho;
Fiz uma pequena "sirene de polícia" pra testar....
Constatei que não tem mesmo como correr do ferro de solda e comprei um KIT SOLDAGEM (ferro de solda, local pra suporte, estanho, esponja vegetal, multímetro, um sugador que puxa a solda e uma placa de fenolite para treinar a solda tudo por R$99) que deverá chegar semana que vem;
Tirei mais um turbilhão de dúvidas hoje com o consultor de assuntos de eletrônica, o Tomaz;
Estudei...
Chegou meu módulo de reconhecimento de voz e eu achei que estava quebrado por vir sem pinos, mas na tentativa e erro vi que ele funciona colocando os jumpers macho nele;
Funciona a alimentação, porém ao tentar acionar os settings da placa dá erro : Check system settings error or timeout
Vou precisar pesquisar como usar esse módulo sem os pinos;
























.png)
























