Resolvi criar um robô chamado HERO-E (Por insistência da minha mulher e filhos) usando ARDUINO. Aqui vou postar as dificuldades e os sucessos até concluir o projeto.
Meu componente de comando de voz não reconhece o arduino mega 2560;
Com isso eu precisei pesquisar comunicação entre arduinos e minha arquitetura ficou consideravelmente mais complicada;
O arduino UNO controla:
LCD
Componente de comandos de voz
Sensor ultrassônico;
O Arduino mega 2560 controla:
Shield Motor L293D
Servo Motor do pescoço;
Pesquisei comunicação entre arduinos e até o momento o que funcionou foi colocando o pino TX (transferencia de dados serial) no RX (receptor de dados na serial) do outro arduino e conectando os GNDs. Só que com o L293D esse pino já é usado e pra isso preciso de novos testes.
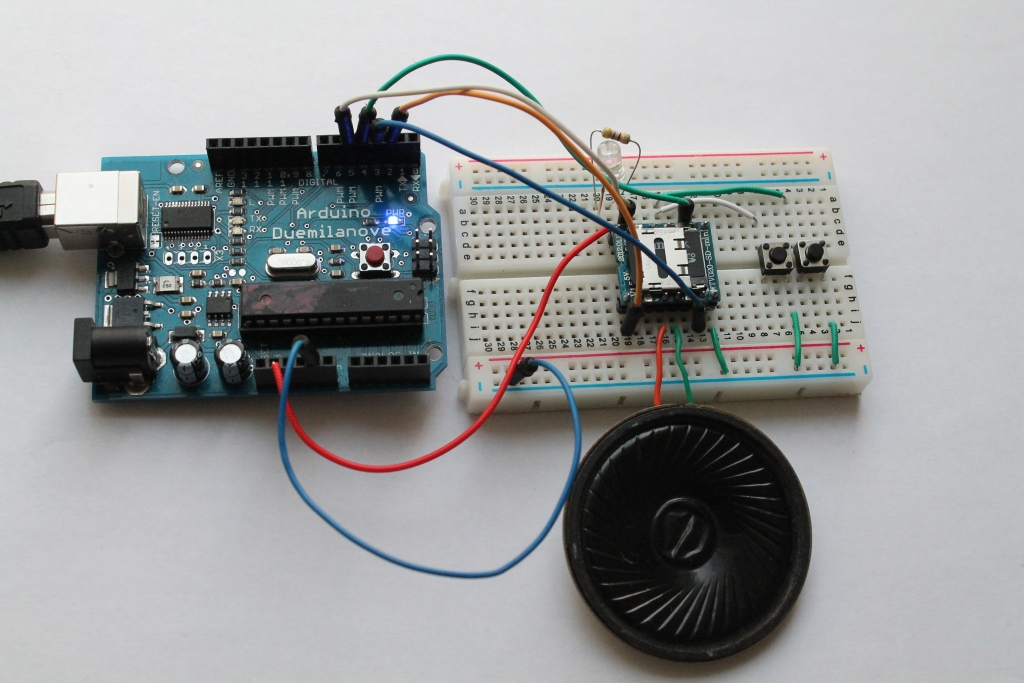
Comecei a pesquisar sobre o meu módulo de voz WTV-020 SD.
Gravei 4 sons para teste(Nome, bom dia, boa noite e bem vindo);
Estou pensando em como eu vou distribuir as peças dentro do "corpo (pote de sorvete)" do robô;
Ideia 1: Colocar duas buchas no porte de sorvete dividido em duas partes. Quando tiver que mexer, tira dois parafusos de um lado e poderei mexer e consertar algo no robô
Pro: Não precisa mexer nos componentes para abrir o robô;
Contra: tem que mexer nos parafusos
Ideia 2: Colocar o pote de sorvete com tampa e quando precisar mexer alguma coisa retirar a tampa.
Pró: Sem parafusos pra mexer e abrir seria simples
Contra: Estrutura dos componentes da cabeça poderia ser comprometida;
Depois de ficar dias empacado no chassi e motor, descobri com a ajuda do grupo do arduino brasil que o problema era que eu estava usando a bateria de 9V e deveria usar 4 pilhas de 1,5V em série;
com isso basicamente falta montar o robô. A parte eletrônica com exceção do DHT22 (que mede temperatura e umidade) já estão em mãos;
Hoje chegou o módulo de som do arduino, que fará o robô falar, nos próximos dias vou testar ele;
Juliana colocou mais requisitos para o Robô que devem ser implementados na versão 2.0 apenas (quer que ele seja secretário dela);
Um problema de lógica que estou tendo. Quero mapear minha casa para que o robô a partir de um ponto chegue a outro cômodo (aceito ajuda de quem ler esse post);